Research Statement
Gary D. Hart
Since
childhood, I always wanted to be a scientist. Indeed, the search and
need for
knowledge and truth is a thirst that can never be quenched.
Furthermore, there
are so many areas that require Mathematics as the necessary tool for
advancement and, not unlike the thrill the early explorers must have
felt when
faced with the frontiers during exploration, I wish to advance the
cause and
lives of mankind by doing cutting edge research.
My
specific areas of interest is Optimization and Numerical Analysis. My
most
recent research projects and my thesis have involved using Optimization
for the
simulation of nonsmooth rigid multibody dynamics with contact and
friction.
Nonsmooth rigid multibody dynamics predicts the position and velocity
evolution
of a group of rigid particles subject to certain constraints and
forces.
Unfortunately, the classical acceleration-force approach does not
necessarily
have a solution with the Coulomb model for friction. This obviously
poses
several obstacles in the path of efficient simulation. This presents a
perfect
opportunity to blend Optimization and Numerical Analysis with my
general areas
of interest, namely, Functional Analysis, Linear Algebra, and
Differential
Equations.
Just
as significant is the fact that out of scientific research spring
exciting
by-products, some of which are completely unexpected but useful. The
discovery
of these by-products is like finding gold. History is full of such
examples. It
is just possible that my research on my Ph.D. dissertation can produce
some
nuggets. This is just another reason why I am committed to the pursuit
of
scientific research.
Motivation of my
recent area of research
Simulating
the dynamics of a system with several rigid bodies and with joint,
contact,
noninterpenetration, and friction constraints is an important part of
many
research areas, e.g. virtual reality, robotics simulations, rock
dynamics, and
structural engineering. It is thus expected that progress in simulating
such
phenomena will have a positive impact upon many such important areas.
A
virtual reality driving simulator is currently being developed with the
hope of
helping patients, for example soldiers or car accident victims, recover
from
post-traumatic stress disorder. Moreover, virtual reality exposure
(VRE)
therapy is used to cure fears of heights, flying, public speaking, and
thunderstorms. [19, 25, 24]
The
U.S. military has extreme interest in robotic simulation for use on the
battlefield. One particular need is the use of self-driving vehicles.
The
medical operating rooms have been invaded by robots, that work with
surgeons to
save lives. In the first half of 2003, the demand for robots increased
by 26
per cent, which at
that time was the highest growth ever recorded.
Scientific context
and previous approaches
Friction
makes the simulation particularly difficult because there may be no
acceleration solution (Painleve Paradox) even when the velocity
solution exists,
so extra care must be taken. If the system has only joint constraints,
then the
problem is a differential algebraic equation (DAE) [11, 18]. However,
the
non-smooth nature of the noninterpenetration and friction constraints
requires
the use of specialized techniques.
Approaches
used in the past for simulating rigid multi-body dynamics with contact
and
friction include piecewise DAE approaches [18], acceleration-force
linear
complementarity problem (LCP) approaches [12, 15, 29], penalty (or
regularization)
approaches [14, 26], and velocity-impulse LCP-based time-stepping
methods [6,
8, 27, 28]. When the value of the time step is set to 0, the LCP of the
velocity-impulse approach is the same as the one used in the
compression phase
of multiple collision resolution [16].
Of
all these approaches, the penalty approach is probably the most
encountered
mechanical engineering literature. It accommodates the non-smooth
nature of
contact and friction by smoothing their mathematical descriptions. The
advantage
of this approach is that it is easy to set up and results in a DAE, for
which
both analytical and software tools are in a fairly mature state of
development.
The disadvantages are that finding a priori appropriate values for the smoothing
parameters is difficult and
that it results a very stiff problem even for moderate time steps.
The
LCP method represents both contact and friction as inequality
constraints that
are computationally treated as hard constraints. The advantage of this
method
is that there are no extra parameters to tune and no artificial
stiffness. It
may therefore be expected to work better with less user input. On the
other
hand, the subproblems are now constrained by inequalities, and separate
analysis and software tools need to be developed to make the approach
successful.
The
velocity impulse LCP based approach that we use has the advantage that
it does
not suffer from the lack of a solution that can appear in the piecewise
DAE and
acceleration-force LCP approach [12, 27]. It also does not suffer from
the
artificial stiffness that is introduced by the penalty approach.
My accomplishments in
the smooth shape approach
I
have developed a method [3] that achieves geometrical
(noninterpenetration and
joint) constraint stabilization for complementarity based time-stepping
methods
for rigid multi-body dynamics with contact, joints, and friction. Such
a method
avoids the constraint drift that appears even in the DAE case following
the
index reduction procedure. A variant of the scheme developed by me and
co-authors is currently used for the dynamical simulation of dynamical
robotic
grasps [5, 23]. This scheme needs no computational effort other than
that for
solving the basic LCP subproblem, though the free term of the LCP is
modified
compared with other time-stepping LCP approaches [6, 7, 28].
The
constraint stabilization issue in a complementarity setting has been
tackled by
using nonlinear complementarity problems [28], an LCP followed by a
nonlinear
projection approach that includes nonlinear inequality constraints [7],
and a
post-processing method [13] that uses one potentially non-convex LCP
based on
the stiff method developed in [7] followed by one convex LCP for
constraint
stabilization. When applied to joint-only systems, the method from [13]
belongs
to the set of post-processing methods defined in [9, 10]. In order to
achieve
constraint stabilization, however, all of these methods need additional
computation after the basic LCP subproblem has been solved. This stands
in contrast
with this approach that needs no additional computational effort to
achieve
constraint stabilization.
The
LCP method represents both contact and friction as inequality
constraints that
are computationally treated as hard constraints. The advantage of this
method
is that there are no extra parameters to tune and no artificial
stiffness. It
may therefore be expected to work better with less user input. On the
other
hand, the subproblems are now constrained by inequalities, and separate
analysis and software tools need to be developed to make the approach
successful. [17]
Assume,
for now, that the mappings defining the joint and noninterpenetration
constraints are differentiable. If the shapes are such the mappings are
differentiable only for small values of the interpenetration, then the
analysis
of this work can be extended, in a straightforward though laborious
manner, as
in [3] to demonstrate the constraint stabilization effect.
1.
We defined a method that achieves constraint stabilization while
solving only
linear complementarity problem per step [3]. Our method does not need
to stop
and detect collisions explicitly and can advance with a constant time
step and
predictable amount of effort per step. We proved that the velocity
stays
bounded and that the constraint infeasibility is uniformly bounded in
terms of
the size of the time step and the current value of the velocity.
2.
In [5] we extended our method to a version with an adjustable parameter γ , and the constraint stabilization
effect was
shown to hold for any
γ ∈ (0, 1] An application of this method was
used in a
robotic grasp simulator [23].
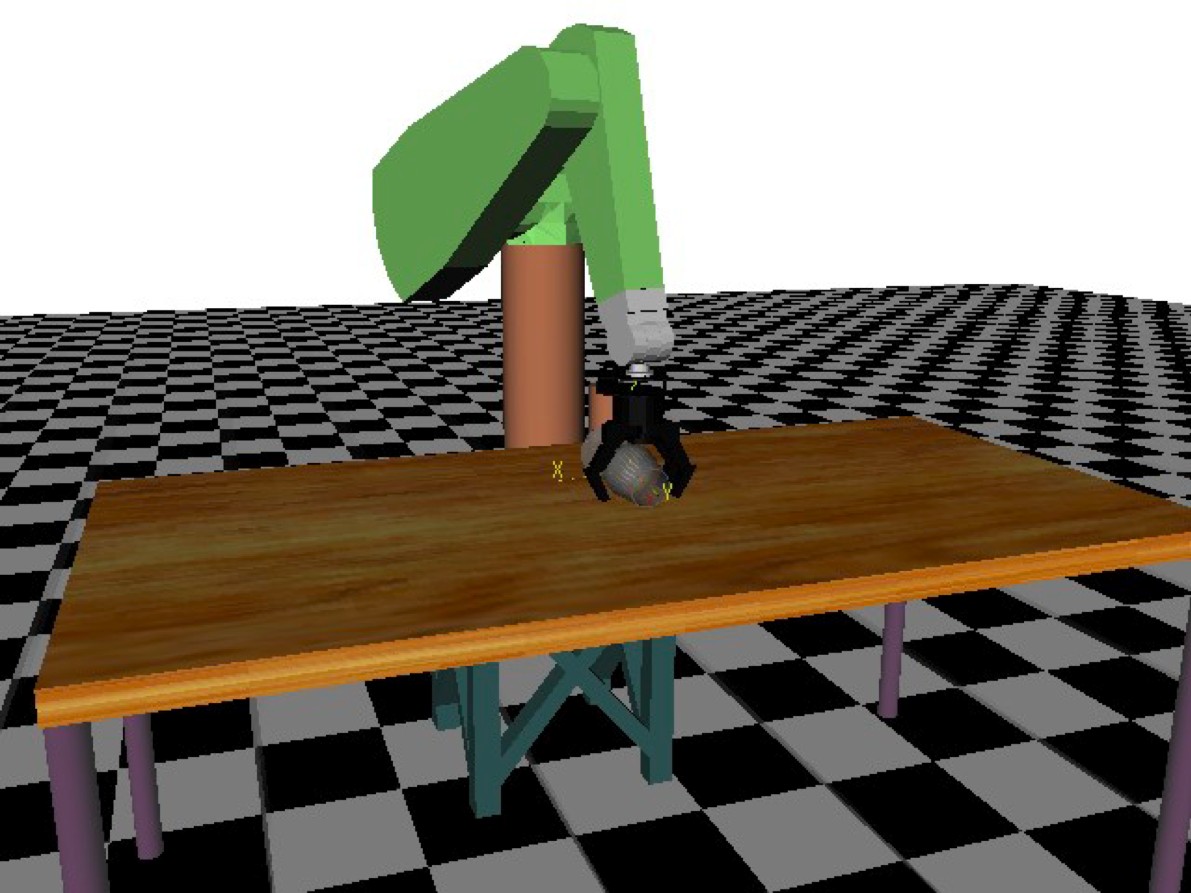
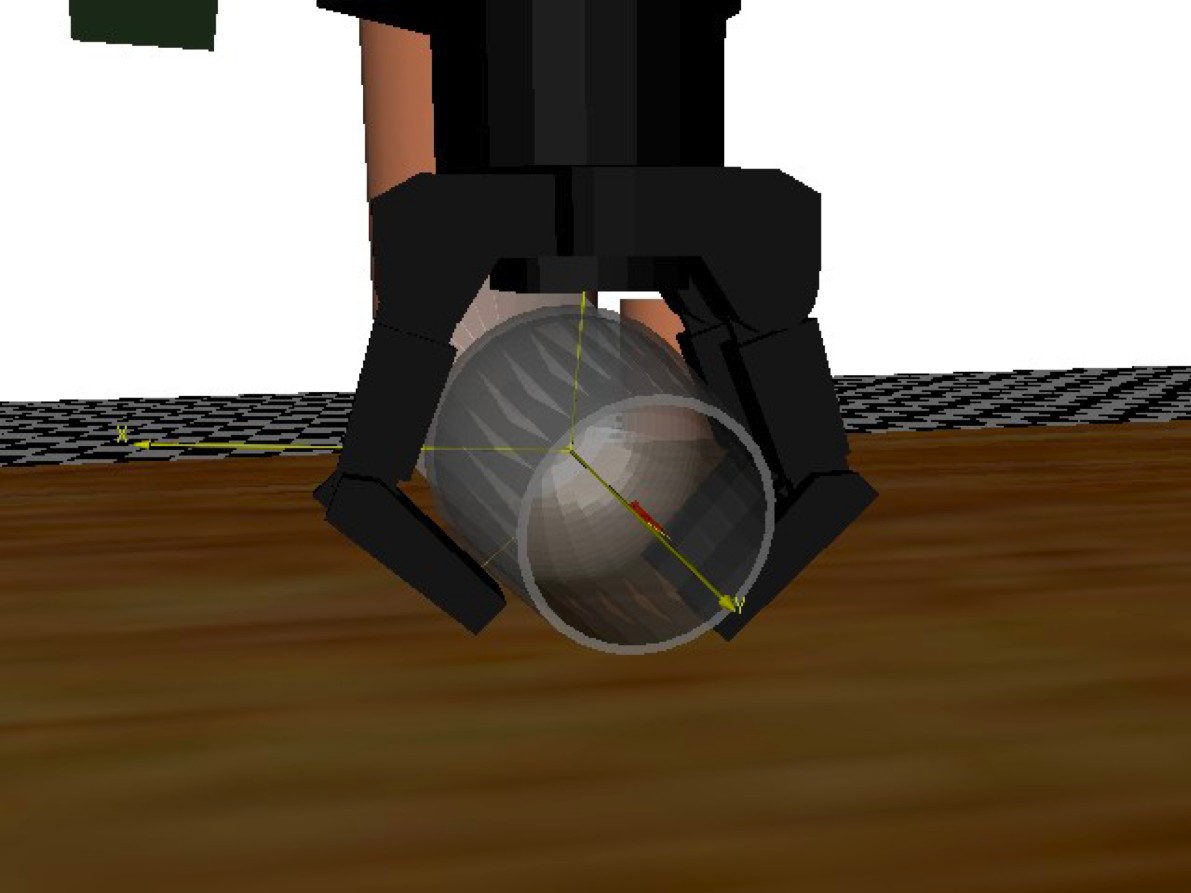
In Figure
1, we see two frames of a robot simulation consisting of a glass that
is within
the reach of a Bartlett hand that starts to close.
Figure
1: Two frames of a robot simulation
3.
We have shown that the solution set of the LCP subproblem may be
nonconvex for
arbitrarily small friction [2]. However, even in this case, we can find
two
iterative methods that converge linearly with a fixed convergence rate
to a
solution point, at least for small values of the friction coefficient
[4],
while solving only convex subproblems that can be solved in polynomial
time.
The result
is especially intriguing since problems with nonconvex solution sets
rarely
have polynomial time solutions. Figure 2 shows a two-dimensional
cannonball
arrangement simulation involving 21 bodies
Figure
2: Two-dimensional cannonball arrangement
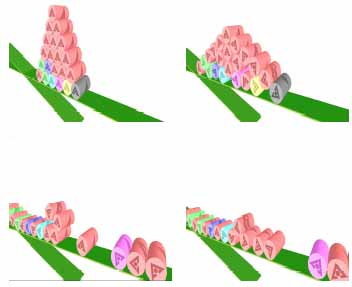
4.
We have shown that our method can be applied to interesting phenomena,
such as
size-based segregation, with 4 order of magnitude larger time steps
while
essentially capturing the same dynamics [17].
Example:
Brazil Nut Effect Simulation. See Figure 3
� Time step of 100ms, for 50s. 270
bodies.
� Convex Relaxation Method. One QP/step.
No collision backtrack.
� Friction is 0.5, restitution
coefficient is 0.5.
� Large ball emerges after about 40
shakes. Results in the same order
of magnitude as MD simulations (but with 4 orders of magnitude larger
time
step).



Figure
3: Brazil Nut Example
Nonsmooth shaped
bodies research
In
all cases, the need for computing a distance between objects becomes
vital. In
physical simulations, for example, collisions and interpenetration
among objects
must be detected. The minimum Euclidean distance is usually used to
compute the
distance between separated objects. But when penetration exists, we
cannot use
this minimal Euclidean distance to describe the extent of the
penetration.
Allowing
a controllable amount of penetration between bodies is useful, since it
allows
one to take larger time steps, and it results in much faster methods.
In
particular, many of the schemes developed by us work with constant time
steps.
Hence will we need to develop a useful measure of distance if we want
to
determine the depth of penetration in the case of nonsmooth shaped
bodies.
Since
any body can be approximated by a finite union of convex, smooth-shaped
bodies,
we could extend, in principle, the analysis for approximation of any
configuration. Probably, however, it is computationally more efficient
to
accommodate non-smooth or non-convex shapes directly, by working with a
piecewise smooth mappings for the distance constraints. With the
intention of
extending results with smooth bodies to non- smooth or non-convex
bodies, it is
my intention to advance research in this specific area. I have already
started
preliminary investigation.
A
natural next step might be to move towards the analysis of contact with
non-smooth
bodies. This makes it imperative that we improve upon our current
method of
detection of collisions or penetrations. Suppose that we could produce
a metric
that was equivalent to the Minkowski-type ones proposed in [1, 20, 21],
but
with the advantage that penetration is simple to determine
computationally, see
Figure 4. I have analyzed such a metric and one of the truly remarkable
aspects
of the use of this metric is its simplicity, in that it only involves
solving a
linear programming problem. Thus it can handle convex polyhedral bodies
and
provide us with an elegant, yet simple way to detect collision and
penetration
of two bodies.



Figure
4: Demonstration of Penetration Depth
I
have shown that this new metric is equivalent, in the usual sense, to
the
current metrics being studied for penetration depth. Moreover, one
great
advantage is that computing this indicator function has complexity O(m + n), where m, n are the facets of the
polyhedra, due to results on the complexity of linear programming in R3 [22]. This compares much favorably
with previous results for
Miinkowski metrics that have a worst case complexity at best O(m2 + n2
) [20, 21].
Theoretically,
this approach can be used for problems in any fixed dimension. We have
succeeded
in simulating a true three-dimensional problem, see Figure 5 Future
research
possibilities exist, as we will probably want to examine whether higher
order
methods are possible and feasible. In addition, we will have to examine
and
possibly refine our approach to energy restitution after a collision.
Figure
5: True Three-Dimensional Case
Future work and
applications
Advances
in these research areas may soon be used in such diverse areas as
nuclear reactors.
In particular, there seems to be an ongoing debate about the
feasibility of
nuclear energy using Pebble Bed Modular Reactors. Therefore, I am
excited at
the endless possibilities that research can allow and, even though the
rewards
are definitely priceless, I plan to request funding from NSF, DOE
(pebble bed
reactor applications), and Defense research programs (DOD, ARO, NRO,
for the
robotics applications), NIH (fluid flow with densely packed particles
for drug
design).
Clearly,
there are many more challenges ahead. Our formulation does not, for
example,
include the case of elastic bodies. Also, does the geometric size of
the
problem escalate, for enormously large numbers of multi-faceted
polyhedra? Of
great importance is the question of whether the results are consistent
in the
limit as the polyhedro become spheres. Finally, I expect our results to
be
relevant to multibody dynamics inside multiphysics, such as particles
in flow.
Since
inquiring minds want to know, I am truly interested in satisfying my
desire to
inquire. That is a desire only research can fulfill. I am looking
forward to
the opportunity to make a positive contribution to the scientific world.
References
[1] P. K. Agarwal, L. J. Guibas, S.
Har-Peled, A. Rabinovitch, and M. Sharir, Penetration depth of two convex
polytopes in 3d, Nordic Journal in
Computing, 7 (2000), pp. 227�240.
[2] M. Anitescu and G. D. Hart, Solving
nonconvex problems of multibody dynamics with joints, contact, and
small friction
by successive convex relaxation, Mechanics Based Design of Structures
and
Machines, 31 (2003), pp. 335�356.
[3]
______ A
constraint-stabilized time-stepping approach for rigid multibody
dynamics with
joints, contact and friction, International Journal for Numerical
Methods in
Engineering, 60 (2004), pp. 2335�2371.
[4]
______ A
fixed-point iteration approach for multibody dynamics with contact and
small
friction, Mathematical Programming, 101 (2004), pp. 3�32.
[5] M. Anitescu, A. Miller, and G. D. Hart, Constraint stabilization for
time-stepping approaches for rigid
multibody dynamics with joints, contact and friction, in Proceedings of
the
2003 ASME International Design Engineering Technical Conferences,
Chicago,
Illinois, 2003, American Society for Mechanical Engineering.
ANL/MCS-P1023-0403.
[6] M. Anitescu and F. A. Potra, Formulating
dynamic multi-rigid-body contact problems with friction as solvable
linear
complementarity problems, Nonlinear Dynamics, 14 (1997), pp. 231�247.
[7]
______ On integrating stiff rigid multibody
dynamics
with contact and friction, in Contact Mechanics. Proceedings of the 3rd
Contact
Mechanics International Symposium, Praia de Consola c ̃ao, Peniche,
Portugal, June 17-21, 2001, Dordrecht, Netherlands, 2002, Kluwer
Academic
Publishers.
[8] M. Anitescu, F. A. Potra, and D.
Stewart, Time-stepping for three-dimensional
rigid-body dynamics, Computer
Methods in Applied Mechanics and Engineering, 177 (1999), pp. 183�197.
[9] U. M. Ascher, H. Chin, L. R. Petzold,
and S. Reich,
Stabilization of constrained
mechanical systems with daes and
invariant manifolds, J. Mech. Struct. Mach, 23 (1995), pp. 135 � 158.
[10] U. M. Ascher, H. Chin, and S. Reich, Stabilization
of daes and invariant manifolds, Numerische Mathematik, 67 (1994), pp.
131�149.
[11] U. M. Ascher and L. R. Petzold, Computer
methods for ordinary differential equations and differential-algebraic
equations, Society for Industrial and Applied Mathematics,
Philadelphia, PA,
1998.
[12] D. Baraff,
Issues in computing
contact forces
for non-penetrating rigid bodies, Algorithmica, 10 (1993), pp. 292�352.
[13] M. B. Cline and D. K. Pai, Post-stabilization
for rigid body simulation with contact and constraints, in Proceedings
of the
IEEE International Conference in Robotics and Automation, IEEE, 2003.
[14] B. R. Donald and D. K. Pai, On the
motion of compliantly connected rigid bodies in contact: a system for
analyzing
designs for assembly, in Proceedings of the Conf. on Robotics and
Automation,
IEEE, 1990, pp. 1756�1762.
[15] C. Glocker and F. Pfeiffer, An
lcp-approach for multibody systems with planar friction, in Proceedings
of the
CMIS 92 Contact Mechanics Int. Symposium, Lausanne, Switzerland, 1992,
pp.
13�30.
[16]
______ Multiple impacts with friction in
rigid
multi-body systems, Nonlinear Dynamics, 7 (1995), pp. 471�497.
[17] G. D. Hart and M. Anitescu, A
hard-constraint time-stepping approach for rigid multibody dynamics
with
joints, contact, and friction, in Proceedings of the Richard Tapia
Celebration
of Diversity in Computing Conference 2003, J. Meza and B. York, eds.,
New York,
NY, USA, 2003, ACM Press, pp. 34�41.
[18] E. J. Haug,
Computer Aided Kinematics
and
Dynamics of Mechanical Systems. Vol. 1: Basic Methods, Allyn &
Bacon, Inc.,
Needham Heights, MA, USA, 1989.
[19] L. Hodges, P. L. Anderson, G. C.
Burdea, H. G. Hoffman, and B. O.
Rothbaum,
Treating psychological and
physical disorders
with vr, IEEE Computer Graphics and Applications, (2001), pp. 25�33.
[20] Y. J. Kim, M. C. Lin, and D. Manocha, Deep:
Dual-space expansion for estimating penetration depth between convex
polytopes,
in Proceedings of the 2002 International Conference on Robotics and
Automation,
vol. 1, Institute for Electrical and Electronics Engineering, 2002, pp.
921�926.
[21] Y. J. Kim, M. A. Otaduy, M. C. Lin,
and D. Manocha, Fast penetration depth computation for
physically-based animation,
in Proceedings of the 2002 ACM Siggraph/Eurograph symposium on Computer
Animation, J. Hodgins and M. van de Panne, eds., San Antonio, Texas,
2002,
Association for Computing Machinery, pp. 21 � 33.
[22] N. Megiddo,
Linear-time algorithms for
linear
programming in r3 and related problems, SIAM Journal on
Computing,
12 (1983), pp. 759�776.
[23] A. Miller and H. I. Christensen, Implementation
of multi-rigid-body dynamics within a robotic grasping simulator, in
IEEE
International Conference on Robotics and Automation, 2003, pp.
2262�2268.
[24] B. O. Rothbaum, L. Hodges, P. L.
Anderson, L. Price, and S. Smith, Twelve-month follow-up of virtual
reality and standard exposure
therapies for the fear of flying, Journal of Consulting and Clinical
Psychology, 70(2) (2002), pp. 428�432.
[25] B. O. Rothbaum, L. Hodges, D. Ready,
K. Graap, and R. D. Alarcon, Virtual reality exposure therapy for
Vietnam veterans with
posttraumatic stress disorder, Journal of Clinical Psychiatry, 62(8)
(2001),
pp. 617�622.
[26] P. Song, P. Kraus, V. Kumar, and P.
Dupont, Analysis of rigid-body dynamic models
for simulation of systems with
frictional contacts, Journal of Applied Mechanics, 68 (2001), pp.
118�128. [27]
D. E. Stewart, Rigid-body dynamics with friction and
impact, SIAM Review, 42
(2000), pp. 3�39.
[28] D. E. Stewart and J. C. Trinkle, An implicit time-stepping
scheme for rigid-body dynamics with inelastic collisions and coulomb
friction,
International Journal for Numerical Methods in Engineering, 39 (1996),
pp.
2673�2691.
[29] J. Trinkle, J.-S. Pang, S. Sudarsky,
and G. Lo,
On dynamic
multi-rigid-body contact problems with coulomb friction,
Zeithschrift fur Angewandte Mathematik und Mechanik, 77 (1997), pp.
267�279.